
روبوت ذكي رباعي الأرجل


مقدمة
تحديث الخوارزمية: حركات أكثر رشاقة وسرعة
تحقيق قدرة أكبر على تجاوز العقبات والقيام بحركات عالية الصعوبة
1. يستطيع القفز فوق الخنادق، والقفز عالياً، وأداء الشقلبات الأمامية وغيرها من الحركات عالية الصعوبة
2. تسلق درجات بارتفاع 15 سم، وهو تقريبًا أقصى ارتفاع يمكن أن تصل إليه الروبوتات رباعية الأرجل من نفس الحجم
3. دعم الشقلبات الخلفية، والتواءات الجسم، والقفزات الملتوية، والتلويح، والمشي على القمر، والتدحرج والنهوض، إلخ.
التطور القابل للتوسع
تصميم معياري لتوسع غير محدود
تساهم حمولة المشي البالغة 1.45 كجم في توسيع مساحة التوسع بشكل كبير
2. توفير واجهات تطوير قدرات الإدراك المتقدمة (SDK و API)
3. يتميز بهيكل وواجهات معيارية مفتوحة، تدعم تركيب وحدات RTK، وشبكات الجيل الخامس 5G، ووحدات الذكاء الاصطناعي، ومعالجات الحافة، ومختلف أنواع أجهزة الاستشعار.
4. مزودة بتقنية الليدار وكاميرا العمق، مما يتيح تطويرًا متعمقًا لقدرات الإدراك المتقدمة مثل الملاحة الذاتية، والتوقف التلقائي عن العوائق وتجنبها، وتحديد المواقع البصرية، وإعادة بناء البيئة.
زيادة بنسبة 50% في عزم دوران المفصل: قوة هائلة للحركات
تتميز وحدات محرك الوصلات عالية العزم المطورة ذاتيًا بكثافة عزم دوران فائقة، ونطاق استجابة واسع، وكفاءة نقل عكسي عالية.
زيادة بنسبة 1.40% في الحد الأقصى لحمولة المشي
2. زيادة قدرة التحمل الحركي إلى الضعف تقريبًا، مع وقت حركة متواصل لمدة 90 دقيقة ومدى يصل إلى 5 كيلومترات
زيادة ثلاثة أضعاف في القدرة الحاسوبية لنظام التحكم الصناعي
اعتماد وحدة قياس القصور الذاتي (IMU) من الدرجة الصناعية لتحسين الاستقرار وقوة الحوسبة بشكل شامل
1. أول تقديم لنظام تحكم صناعي عالي الجودة يعمل في الوقت الحقيقي مع نواة محسّنة للغاية
2. زادت القدرة الحاسوبية الإجمالية بنحو ثلاثة أضعاف
3. مع اتصال عالي السرعة في الوقت الحقيقي وتردد تحكم يصل إلى 1 كيلو هرتز
نظام تفاعل الإنسان مع الآلة مطور بالكامل
1. تحسين أداء نقل الصور في الوقت الفعلي من النظرة الأولى مع تقليل زمن الاستجابة
2. تمت إضافة تفاعل لغة الإضاءة، مما يسمح للمستخدمين بالحصول على حالات مختلفة للروبوت رباعي الأرجل في الوقت الفعلي
3. حركات أكثر أمانًا وتنوعًا بمساعدة الإدراك
4. يدعم وظائف التوقف والتعرف على العوائق الأمامية والخلفية وتتبعها، وتجنب العوائق الأمامية، والملاحة الذاتية، وغيرها.
المعايير الفنية
| 1. منصة الأجهزة | |
| الحجم القائم | الطول 610 مم ± 10 مم، العرض 370 مم ± 10 مم، الارتفاع 445 مم ± 10 مم |
| حجم الاستلقاء | الطول 680 مم ± 10 مم، العرض 370 مم ± 10 مم، الارتفاع 175 مم ± 10 مم |
| الوزن الإجمالي (مع البطارية) | حوالي 12.2 كجم |
| القدرة على التحمل بدون حمل | من ساعة ونصف إلى ساعتين، المدى: 4 كيلومترات |
| يعتمد الروبوت خوارزمية تحكم كاملة في القوة لتحقيق التوازن. ويمكنه تحقيق استشعار ثلاثي الأبعاد للقوة بزاوية 360 درجة عند القدم دون الحاجة إلى مستشعرات ضغط النعل، مما يقلل من تآكل القدم وتكاليف الصيانة. | |
| مادة | الفخذان: سبيكة ألومنيوم؛ السيقان: بلاستيك مركب عالي القوة؛ الخامات: مطاط ماص للصدمات، ومضاد للانزلاق، ومقاوم للتآكل. |
| بطارية | مزود ببطارية ليثيوم قابلة للتوصيل؛ سعة البطارية ≥4400 مللي أمبير، الطاقة المقدرة ≥126.7 واط ساعة؛ وقت الشحن: 40 دقيقة ~ ساعة واحدة. |
| عمق المجال | إجمالي درجات الحرية (DOF): 12؛ درجة الحرية لكل ساق: 3. |
| وحدة وصل | يعتمد على وحدة وصل متكاملة بقطر خارجي ≤76 مم؛ تتكون من محرك عالي الكثافة، ومخفض عالي الدقة، ومشفر مطلق، ومستشعر درجة الحرارة. |
| مخرج طاقة مدمج (5 فولت/12 فولت/24 فولت) وواجهات اتصال (إيثرنت/واي فاي) لتسهيل التطوير الثانوي. | |
| أوضاع الحماية | إيقاف طوارئ ناعم، إنذار انخفاض الجهد، إنذار ارتفاع درجة الحرارة. |
| 2. التحكم في الحركة |
| يعتمد على مستشعر قصور ذاتي من الدرجة الصناعية؛ دقة مقياس التسارع تصل إلى 0.09 ملغ، ودقة الجيروسكوب تصل إلى 0.004 درجة/ثانية. |
| تردد التحكم في ناقل الاتصال: 1 كيلو هرتز. |
| يوفر مشيًا ثابتًا وخطوات سريعة |
| يدعم المشي بما في ذلك صعود السلالم والمنحدرات والزحف؛ أقصى ميل للصعود: 40 درجة (رهناً بمادة المنحدر)؛ أقصى ارتفاع للدرج المتواصل: 15 سم؛ قابل للتكيف مع الطرق الخرسانية والطرق الحصوية وما إلى ذلك. |
| حمولة المشي المستمر: تصل إلى 4.5 كجم. |
| يدعم الحركة في المكان، والتحريك للأمام/للخلف/لليسار/لليمين، والدوران لليسار/لليمين. |
| يوفر العديد من الحركات التوضيحية: القفز للأمام، والقفز الملتوي، والمشي على القمر، وما إلى ذلك؛ أقصى مسافة للقفز للأمام: 50 سم. |
| يدعم تطوير أنماط المشي والحركات الأخرى عالية الأداء |
| 3. الإدراك الذكي |
| كاميرا واسعة الزاوية*1: مجال رؤية أفقي 130 درجة؛ 1920×1080@30 إطارًا في الثانية؛ مضادة للوهج، وخالية من التشوه؛ تدعم تطوير خوارزميات التعرف على جسم الإنسان وتتبعه. |
| رادارات فوق صوتية *2: تدعم اكتشاف المسافة وتطوير خوارزمية إيقاف العوائق. |
| مزودة بنظام تجنب العوائق الأمامية والخلفية. |
| 4. التطوير الثانوي |
| يوفر نموذج الروبوت، ومجموعة تطوير البرمجيات الخاصة بالحركة وواجهة برمجة التطبيقات، وعرض توضيحي لتطوير الحركة، وأدلة تطوير ثانوية مفصلة. |
| يوفر واجهات برمجية لتطوير الإدراك مع أدلة استخدام وتطوير مفصلة؛ ونظام ROS مدمج للتطوير الثانوي السريع. |
تعريف بالشركة
في عام 2008، تم تأسيس شركة Beijing Hewei Yongtai Technology Co., LTD في بكين. وتركز الشركة على تطوير وتشغيل معدات السلامة الخاصة، وتخدم بشكل رئيسي جهات الأمن العام والقانون والشرطة المسلحة والجيش والجمارك وغيرها من إدارات الأمن القومي.
في عام 2010، تم تأسيس شركة جيانغسو هيوي لتصنيع معدات الشرطة المحدودة في غوانان. وتغطي مساحة 9000 متر مربع من ورشة العمل ومبنى المكاتب، وتهدف إلى بناء قاعدة بحث وتطوير من الدرجة الأولى لمعدات السلامة الخاصة في الصين.
في عام 2015، تم إنشاء مركز أبحاث وتطوير عسكري-شرطي في شنتشن. ويركز على تطوير معدات السلامة الخاصة، وقد طور أكثر من 200 نوع من معدات السلامة الاحترافية.






المعارض الخارجية


الشهادات
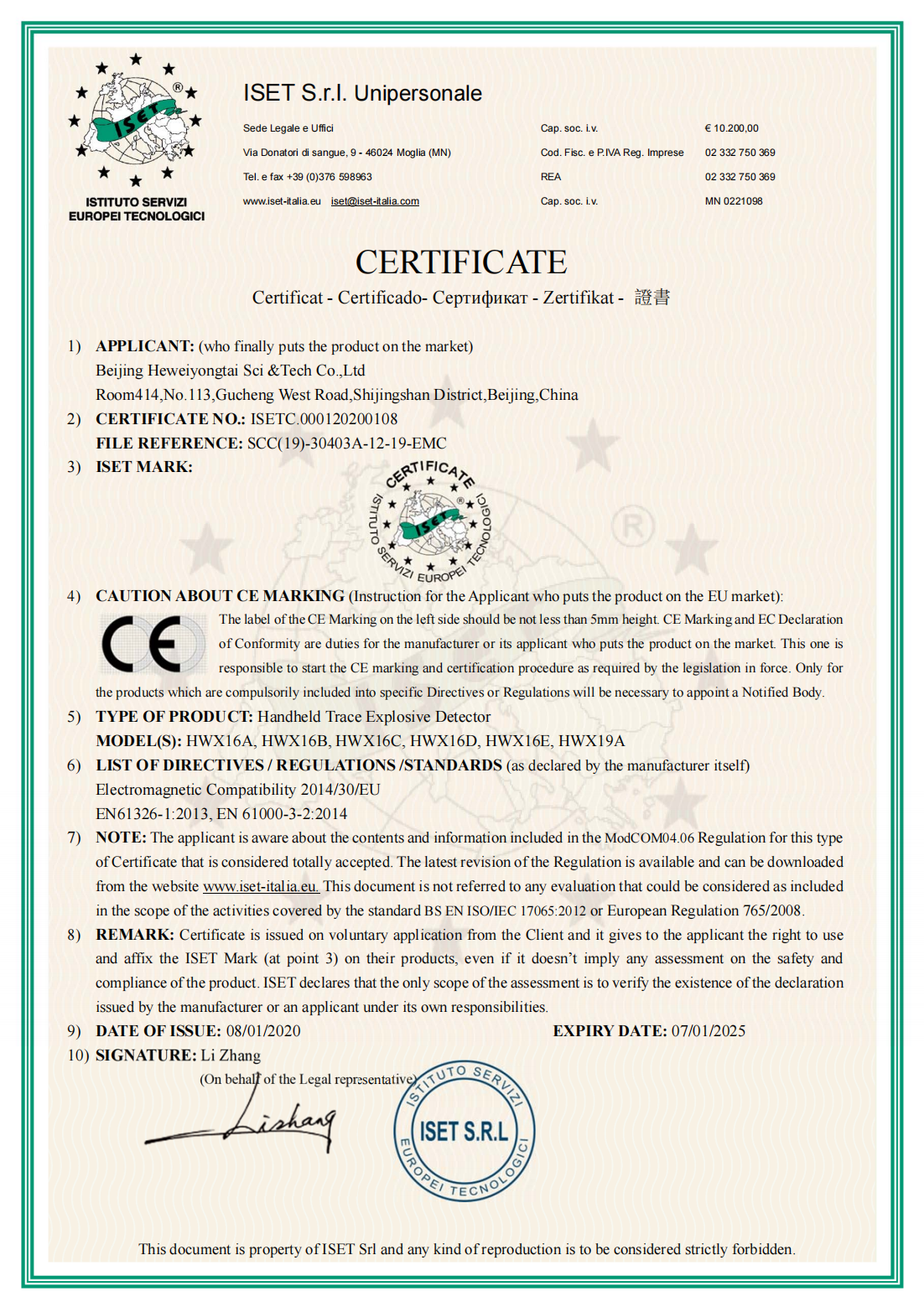

شركة بكين هيويونغتاي للعلوم والتكنولوجيا المحدودة هي مورد رائد لحلول إزالة المتفجرات والأمن. جميع موظفينا من المهنيين الفنيين والإداريين المؤهلين لتقديم خدمة مرضية لكم.
جميع منتجاتنا مزودة بتقارير اختبار وشهادات اعتماد على المستوى المهني الوطني، لذا يرجى الاطمئنان عند طلب منتجاتنا.
مراقبة جودة صارمة لضمان عمر خدمة طويل للمنتج وسلامة عمل المشغل.
مع خبرة صناعية تزيد عن 10 سنوات في مجال إزالة المتفجرات، ومعدات مكافحة الإرهاب، وأجهزة الاستخبارات، وما إلى ذلك.
لقد قدمنا خدمات احترافية لعملاء في أكثر من 60 دولة حول العالم.
لا يوجد حد أدنى للطلب لمعظم المنتجات، وتوصيل سريع للمنتجات المصممة حسب الطلب.




